This
is a webbified version of a paper in the
Proceedings
of
Art
+ Math = X International Conference in
honor of Michele Emmer on his 60th Birthday
Spaghetti Code: A Sculpture Barnraising
Computer Science Department
Stony Brook University
Stony
Abstract
A two-meter diameter metal
sculpture was assembled by a group of two hundred students, faculty,
and staff
at
1. Design
I construct geometric sculpture of various
materials
and like to engage groups of helpers in “sculpture barn raisings” [1-4]. Spaghetti
Code, shown in Figure 1, is my
latest example. The term Spaghetti Code
is computer science jargon for a poorly organized program, but the
sculpture is actually highly organized.

Figure 1:
Spaghetti Code, aluminum, 2
meter diameter.
Spaghetti
Code is constructed of 180
laser-cut, flat, aluminum parts. The form was carefully optimized over
several
months both for its aesthetics and to allow rapid, secure assembly.
When
designing sculpture to be constructed from rigid parts, the connections
are a
difficult issue that must be thought out carefully. My solution in this
case
was 300 simple mortise and tenon joints, locked with stainless steel
cotter pins.
A major difficulty with this approach is that, because of the nature of
laser-cutting, both the mortise (a
rectangular slot) and the
hole in the tenon for the locking pin must be at 90 degrees to the
material.
Consequently, these joints require mating parts to lie in orthogonal
planes. It
would be easy to design a cube or rectangular box under this
constraint, but I
puzzled quite a while about how to make an intricate yet well-connected
form
with icosahedral symmetry using only 90-degree connections.
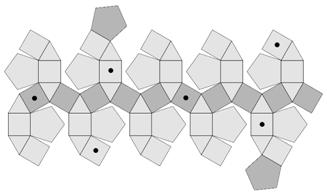
Figure 2: Rhombicosidodecahedron (RID) and its net.
To understand the many 90-degree angles in Spaghetti Code, it may help to begin with the rhomb-icosidodecahedron (RID) of Figure 2. This well-known Archimedean solid comprises 12 pentagons, 20 triangles, and 30 squares. It is not obvious that many pairs of faces lie in planes that intersect each other at 90 degrees. The unfolded net of the RID in Figure 2 illustrates this by shading two opposite pentagons, positioned as a North and South pole, and an “equator” of ten squares. The equatorial squares are halfway between the poles, so their planes lie at 90 degrees to the shaded pentagons’ planes. Because of the symmetry of this polyhedron, we could choose among six different pairs of pentagons to be the poles, each defining an equator of squares. This provides 120 pairs of orthogonal planes. There are also many 90-degree relationships between planes of two square faces. A careful study of the RID shows that the six squares marked with a dot in the net lie in the face planes of a cube, so provide twelve orthogonal pairs. There are five cubes among the 30 squares, providing in total 60 such pairs of orthogonal planes.
To take advantage of these 180 orthogonal plane pairs, the design of Spaghetti Code has 60 components in the twelve planes of the pentagons of one RID (five per pentagon) and has 120 components in the thirty planes of the squares of a larger concentric parallel RID (four per square). Selecting planes from two sizes of RIDs allows extra design freedom, yet scaling a set of planes radially inward or outward is only a translation so neither destroys the symmetry nor changes the 90-degree angle between planes. A total of 300 connections was achieved by having two pairs of parts join at some of the pairs of planes.
To
develop
the detailed form and arrange for the components to pass around others
that lie
in non-orthogonal planes, I used the software of [2]. This software
allows the
visualization and editing of symmetric sculpture, and outputs geometric
description files in formats suitable for laser-cutting and solid
freeform
fabrication. The parts were fabricated at a commercial laser-cutting
service
bureau from 0.1-inch thick aluminum (6061-T6 alloy) and given a surface
brushing on the outer side, which creates a gleaming visual effect.
Preparation
also included deburring the parts and
drilling holes
in five of them for suspending from chains. Before the assembly, I was
able to promote
the event with computer renderings such as Figure 3 and a small
physical model.
The solid freeform fabrication model, made of nylon by selective laser
sintering, is shown in Figure 4.
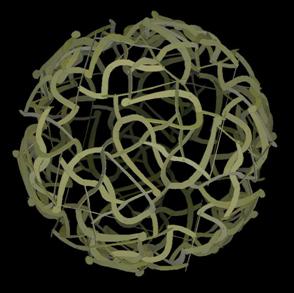
Figure 3: Computer rendering.
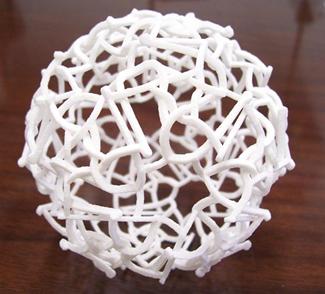
Figure 4: Laser-sintered nylon model, 3 inches.
As
a final
preparation step, I laser-cut parts for a half-scale version in
quarter-inch Baltic
birch plywood. This allowed me to test the assembly sequence, confirm
the five
suspension points, and verify that I made no gross miscalculations,
before
committing to the expense of laser cutting the metal parts. Figure 5
shows the
assembled wooden version. Its tenons are locked with 300 small wooden
wedges.
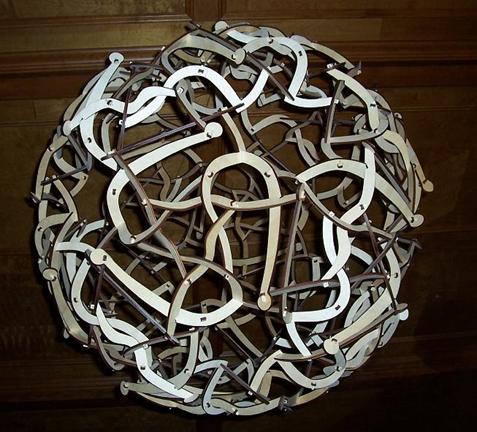
Figure 5:
Wood version, 1
meter
diameter.
2. Barn
Raising
The

Figure 6: Initial step of forming triangles.

Figure 7: Completed nine-part module.
The
nine-piece units each have a 3-fold axis of symmetry and correspond in
the
overall structure to one triangle of an icosahedron. Using a temporary
suspension
point in easy reach near the ground, we started assembling the units
together. Figure
8 shows a point where the top five modules are assembled to form a dome
and the
next layer is being added. Again, some intricate weaving is required to
position
the parts properly, but I was able to direct from the center of the
structure
while groups of students worked around me. Figure 9
shows the insertion of cotter pins and gives a view of the mortise and
tenon
joints.

Figure 8: Five modules form a dome.

Figure 9: Inserting cotter pins.
The
adding and
locking of modules continued until its icosahedral form was complete.
Total
assembly time was under two hours. We easily hauled its 80 pounds up to
a hook
that had previously been installed in the ceiling to hold it. Figure 10
shows the
view looking up along a 5-fold axis from directly below.

Figure 10: Completed sculpture, viewed from directly below.
3. Conclusions
Spaghetti Code now hangs in the computer
science building lobby at
References
[1] G. Hart,
"The Millennium Bookball," Proceedings of Bridges
2000:
Mathematical Connections in Art, Music and Science, Southwestern
College,
Winfield, Kansas, July 28-30, 2000, and in Visual Mathematics
2(3) 2000,
and at http://www.georgehart.com
[2] G. Hart,
"Sculpture from Symmetrically
Arranged Planar Components", in Meeting Alhambra, (Proceedings of
ISAMA-Bridges 2003, Granada, Spain), Javier Barrallo
et al editors, Univ. of Granada, 2003, pp. 315-322.
[3] G. Hart,
"A Reconstructible
Geometric Sculpture", Proceedings of ISAMA CTI 2004, DePaul
University, June 17-19, 2004, Stephen Luecking
ed.,
pp. 141-143.
[4] G. Hart,
"A Salamander Sculpture Barn
Raising", Proceedings of Bridges 2004: Mathematical Connections in
Art,
Music, and Science, Southwestern College, Winfield, Kansas, July
2004, and
in Visual Mathematics 7, no. 1, 2005.
Acknowledgements: Thank you Arie
Kaufmann for finding funds to cover the materials. Thank you Jim Quinn
for making the SFF model of Figure 4. Thank you Erik and Martin Demaine for
letting me use a laser-cutter at MIT to make the parts for Figure 5. And thank you
especially
to everyone who participated in the assembly!